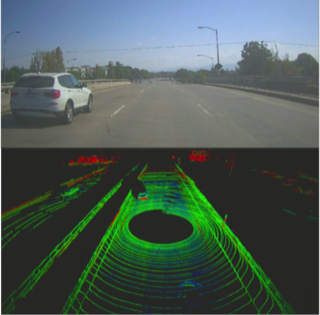
Bridge
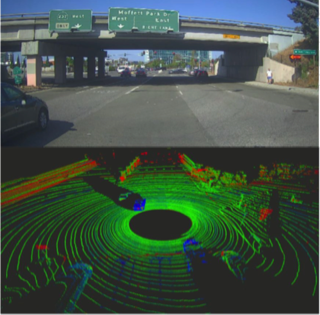
Overpass
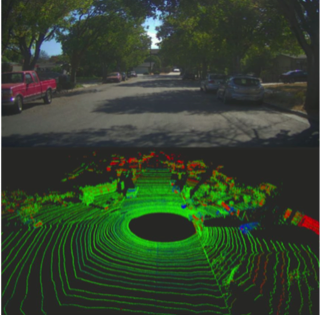
Tree-lined road
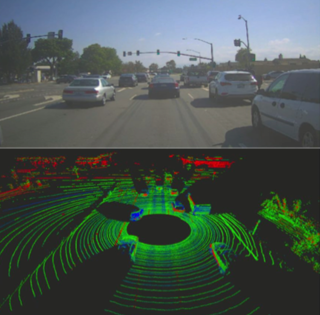
Intersection
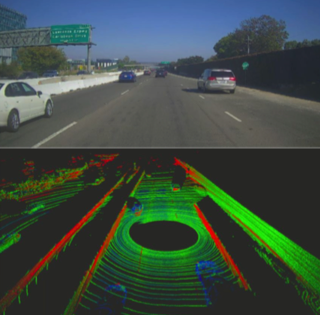
Highway
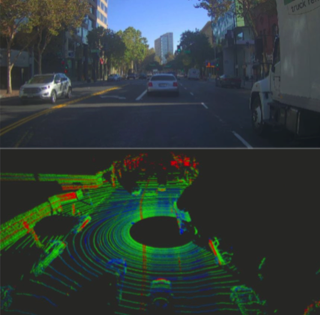
Downtown

**@brief load poses file.
* @param <pose_file_path> path of pose file.
* @param <indexs> index of PCD files.
* @param <timestamps> timestamp of PCD files.
* @param <poses> the pose of PCD files, including translation and quaternion.
*/
bool load_pcd_poses(
const std::string& pose_file_path,
std::vector<int>& indexs,
std::vector<std::string>& timestamps,
std::vector<Eigen::Affine3d>& poses) {
std::ifstream inf(pose_file_path.c_str());
if (!inf) {
return false;
}
int index = 0;
std::string timestamp;
double tran_x = 0.0;
double tran_y = 0.0;
double tran_z = 0.0;
double quat_x = 0.0;
double quat_y = 0.0;
double quat_z = 0.0;
double quat_r = 0.0;
while(inf >> index >> timestamp >> tran_x >> tran_y
>> tran_z >> quat_x >> quat_y >> quat_z >> quat_r) {
indexs.push_back(index);
timestamps.push_back(timestamp);
Eigen::Quaterniond quat(quat_r, quat_x, quat_y, quat_z);
Eigen::Translation3d trans(tran_x, tran_y, tran_z);
Eigen::Affine3d pose = trans * quat;
poses.push_back(pose);
}
inf.close();
if (poses.size() > 0) {
return true;
} else {
return false;
}
}
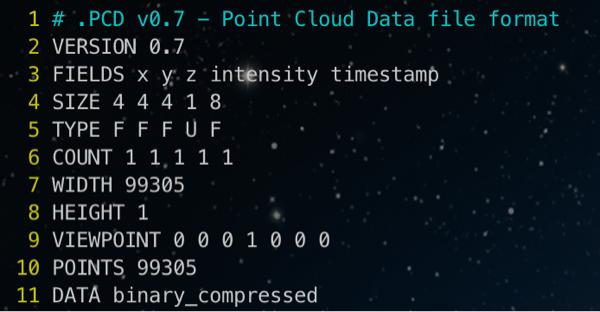
/**@brief register the format header of PCD file of dataset into PCL. */
struct PointXYZIT {
float x;
float y;
float z;
unsigned char intensity;
double timestamp;
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
} EIGEN_ALIGN16;
POINT_CLOUD_REGISTER_POINT_STRUCT (PointXYZIT,
(float, x, x)
(float, y, y)
(float, z, z)
(uint8_t, intensity, intensity)
(double, timestamp, timestamp)
)
/**@brief load pcd file.
* @param <pose_file_path> path of pcd file.
* @param <cloud> a PointXYZIT type pointer to store the content of PCD file.
*/
bool load_pcd_file(
const std::string& load_pcd_path,
pcl::PointCloud<PointXYZIT>::Ptr cloud) {
if (pcl::io::loadPCDFile(load_pcd_path.c_str(), *cloud) != 0) {
std::cerr << "Can't load pcd file from " << load_pcd_path << std::endl;
return false;
}
return true;
}
/**@brief transform a source cloud according to the given pose into the global coordinate system. * @param <pose> The pose of PCD file.
* @param <src_cloud> The source point cloud will be transformed.
* @param <dst_cloud> The transformed result of source point cloud.
*/
void transform_pointcloud(
const Eigen::Affine3d& pose, pcl::PointCloud<PointXYZIT>::Ptr src_cloud, pcl::PointCloud<PointXYZIT>::Ptr dst_cloud) {
pcl::transformPointCloud(*src_cloud, *dst_cloud, pose); }

@inproceedings{L3NET_2019_CVPR,
title={L3-net: Towards learning based lidar localization for autonomous driving},
author={Lu, Weixin and Zhou, Yao and Wan, Guowei and Hou, Shenhua and Song, Shiyu},
booktitle={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition},
pages={6389--6398},
year={2019}
}
