惯导设备PP7配置
本文档介绍 Novatel 捷联惯性导航设备 PP7 的配置,通过本文档,您可以学会如何配置和使用 捷联惯性导航设备PP7,让它在 Apollo 中正常工作。捷联惯性导航设备PP7,以下称为导航设备PP7或者PP7。
前提条件
为了更快、更好的理解本文档的内容,您需要提前做好以下准备工作:
- 完成了 循迹搭建--车辆集成。
- 测量好 PP7 的两个天线的杆臂值
Apollo 定位模块配置之 PP7 配置
PP7的配置方式有好多种,您可以使用如minicom命令行串口工具,也可以使用cutecom图形化串口工具,当然,你也可以使用NovAtel官网提供的NovAtel Application Suite图形化工具对其进行配置。在此文档中介绍的配置工具为NovAtel官网提供的NovAtel Application Suite。NovAtel Application Suite分为Windows平台版本和Linux平台版本,本文档介绍使用Linux平台版本的NovAtel Application Suite工具对PP7进行配置,本文档使用的是NovAtel Application Suite集成的的命令行工具对PP7进行配置,至于其图形化方式配置在此文档中不做介绍,有兴趣的开发者可以自行探讨。另外使用NovAtel Application Suite集成的命令行工具配置PP7对使用诸如minicom、cutecom等工具配置PP7的开发者具有参考意义。
1. 安装NovAtel Application Suite
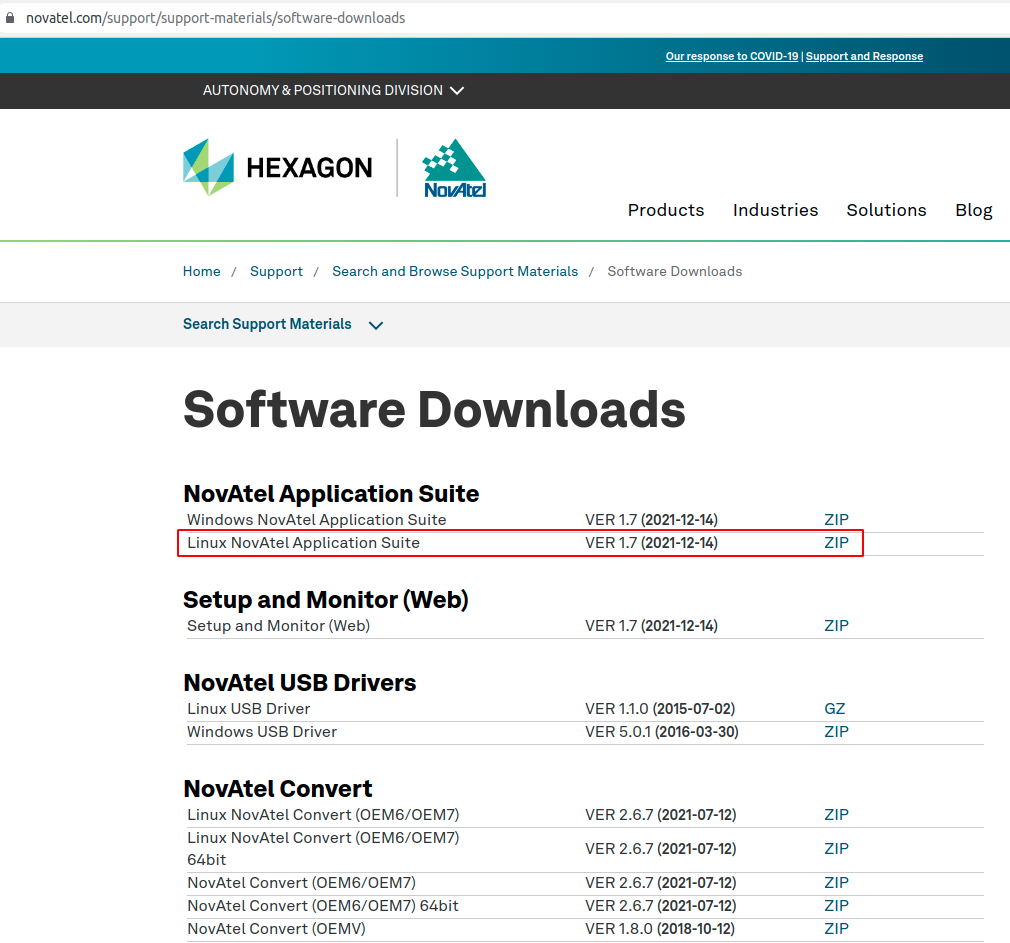
NovAtel官网下载页面下载Linux平台版本的NovAtel Application Suite工具(点击后面的 ZIP 即可下载),下载完成后是一个压缩包,NovAtel Application Suite是免安装的,解压后可以直接使用。
下载地址:https://novatel.com/support/support-materials/software-downloads 。
2. 连接PP7设备到Linux主机
- 使用USB线缆将PP7的
COM PORTS接口连接到Linux主机的USB接口上。

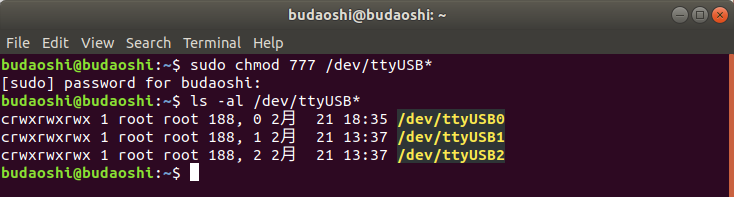
- 在Linux主机命令行终端中输入执行命令:
ls -al /dev/ttyUSB*查看PP7设备号。

命令执行后会显示3个USB设备,分别是/dev/ttyUSB0、/dev/ttyUSB1、/dev/ttyUSB2 。这里显示的设备号可能跟各位开发者显示的不同,这设备号与Linux主机上连接的USB设备数量有关。这里以/dev/ttyUSB0、/dev/ttyUSB1、/dev/ttyUSB2为例跟大家介绍。
- 在命令行终端中输入执行命令:
sudo chmod 777 /dev/ttyUSB*给所有ttyUSB设备可读可写可执行权限。
3. 添加PP7设备
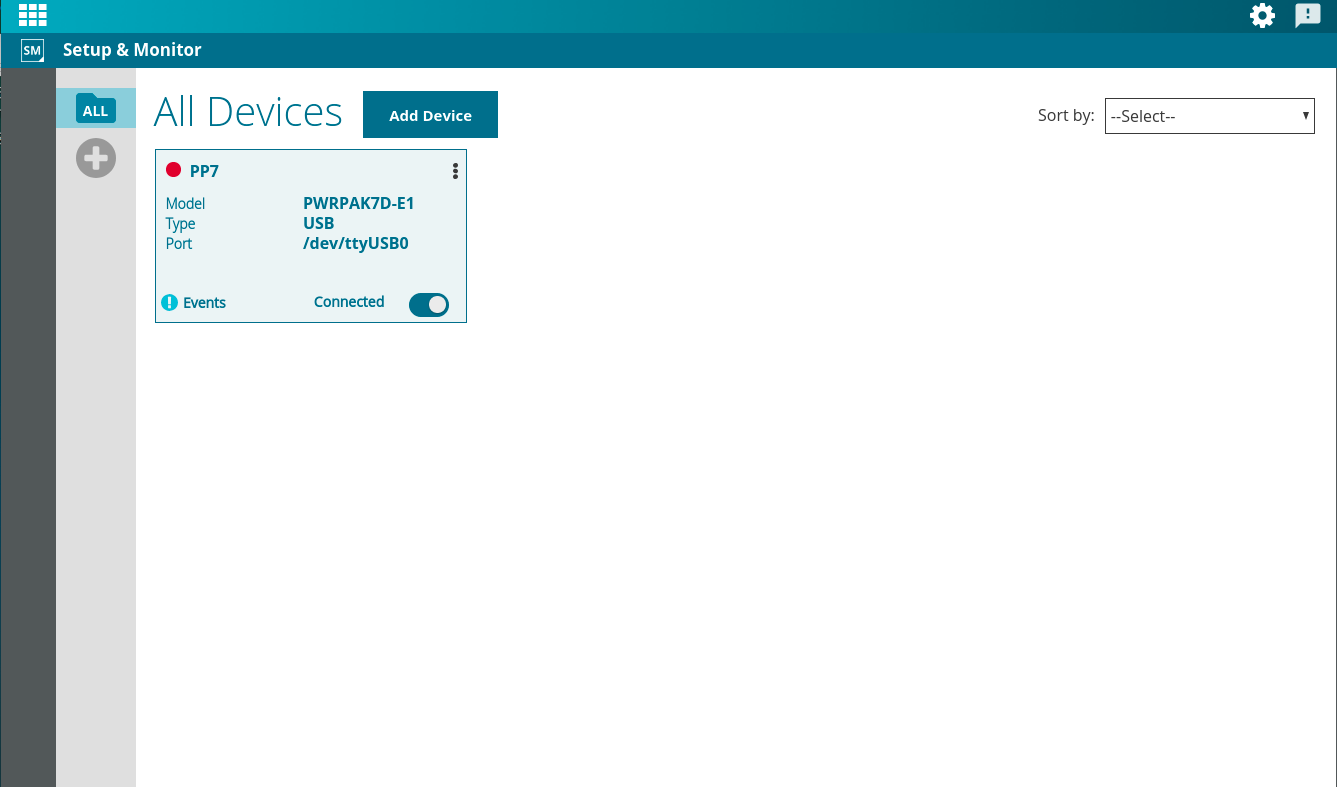
- 进入NovAtel Application Suite解压后的文件夹,双击
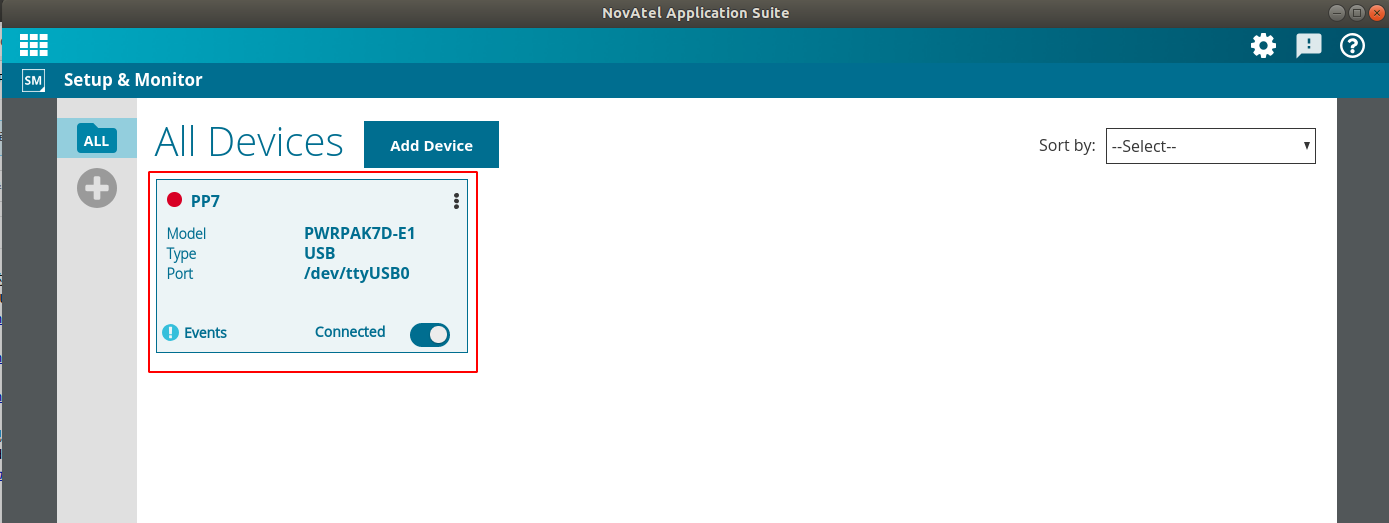
NovAtelApplicationSuite_64bit.AppImage应用程序即可启动NovAtel Application Suite软件。 - 在启动后的界面上点击“Add Device”按钮,在弹出的页面中的connection Name框中填
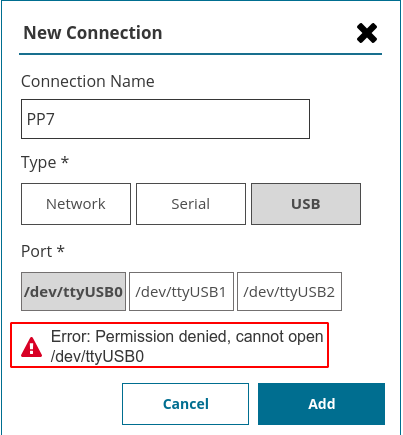
PP7,在Type中选择USB,在Port中选择/dev/ttyUSB0后,点击“Add”按钮添加PP7设备。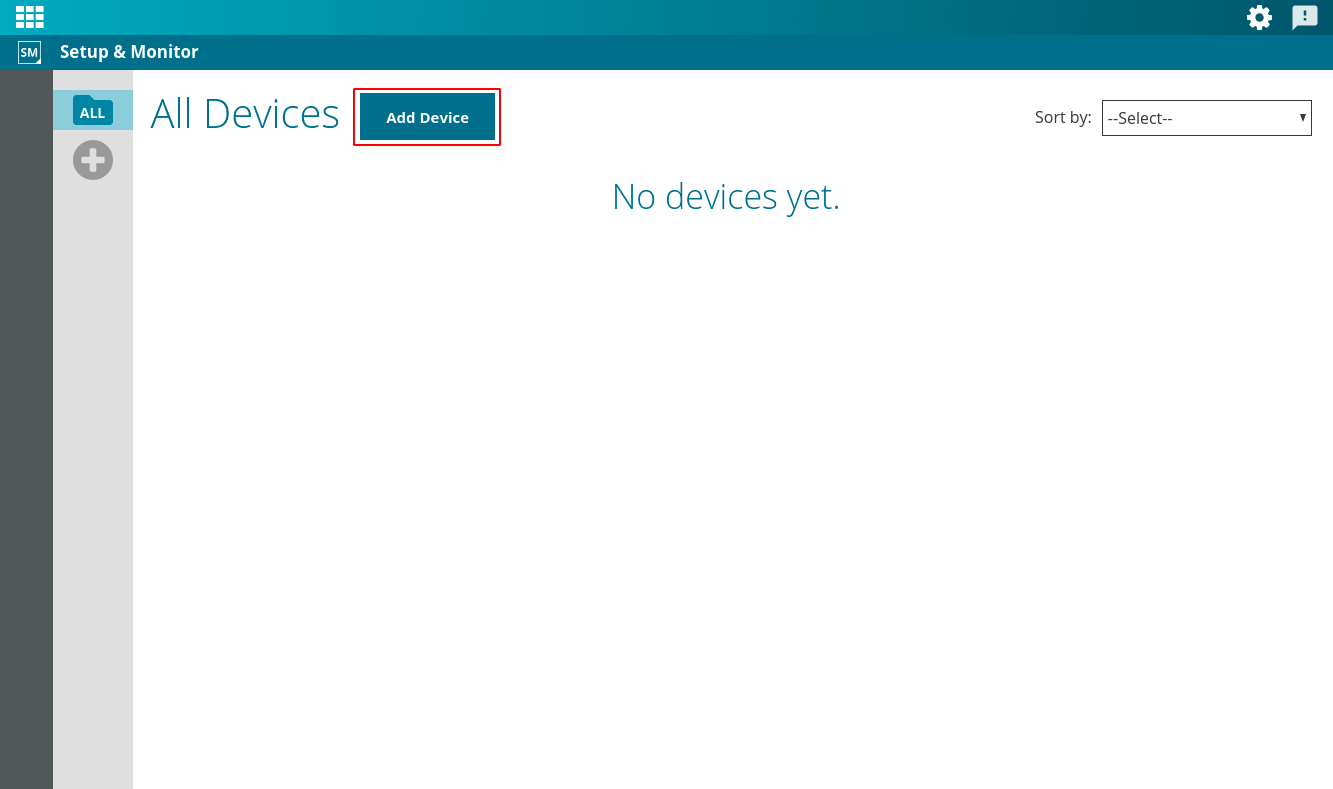
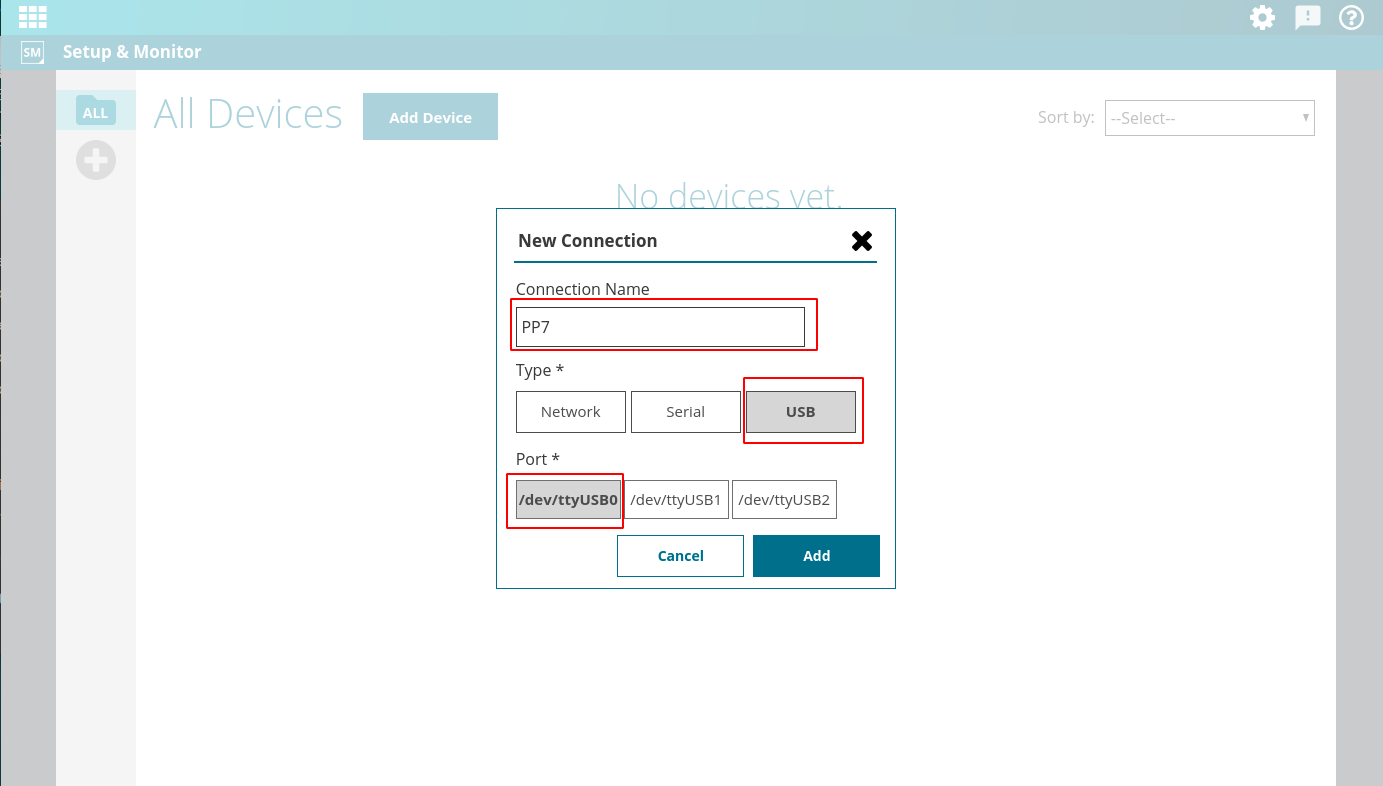
注意:若出现 Error: Permission denied, cannot open /dev/ttyUSB0 ,表示添加失败,请在命令行终端中执行以下命令:sudo chmod 777 /dev/ttyUSB*给所有ttyUSB设备赋予可不可写可执行权限。
4. 配置PP7设备
- 点击连接的PP7设备,打开PP7设备界面。
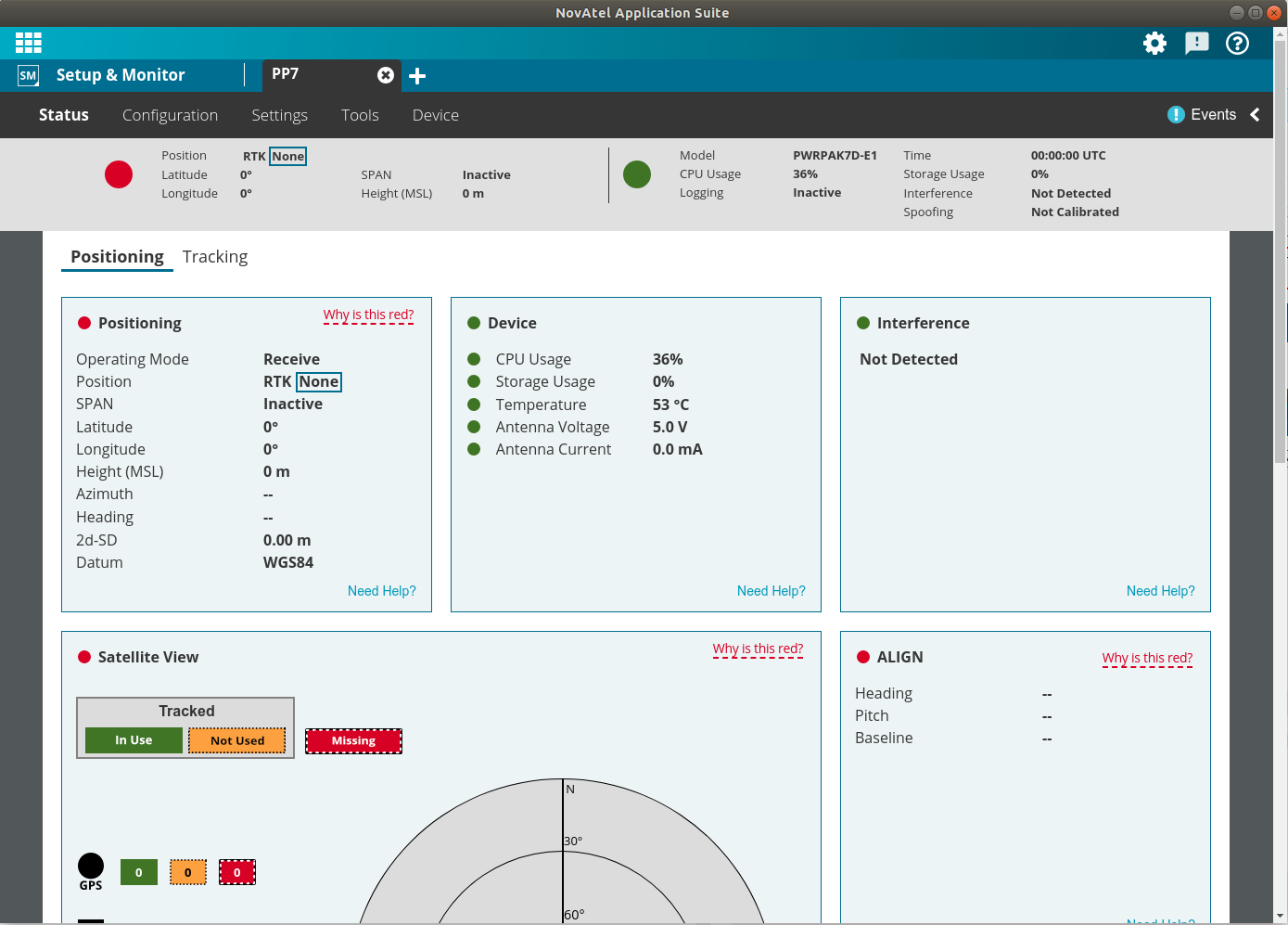
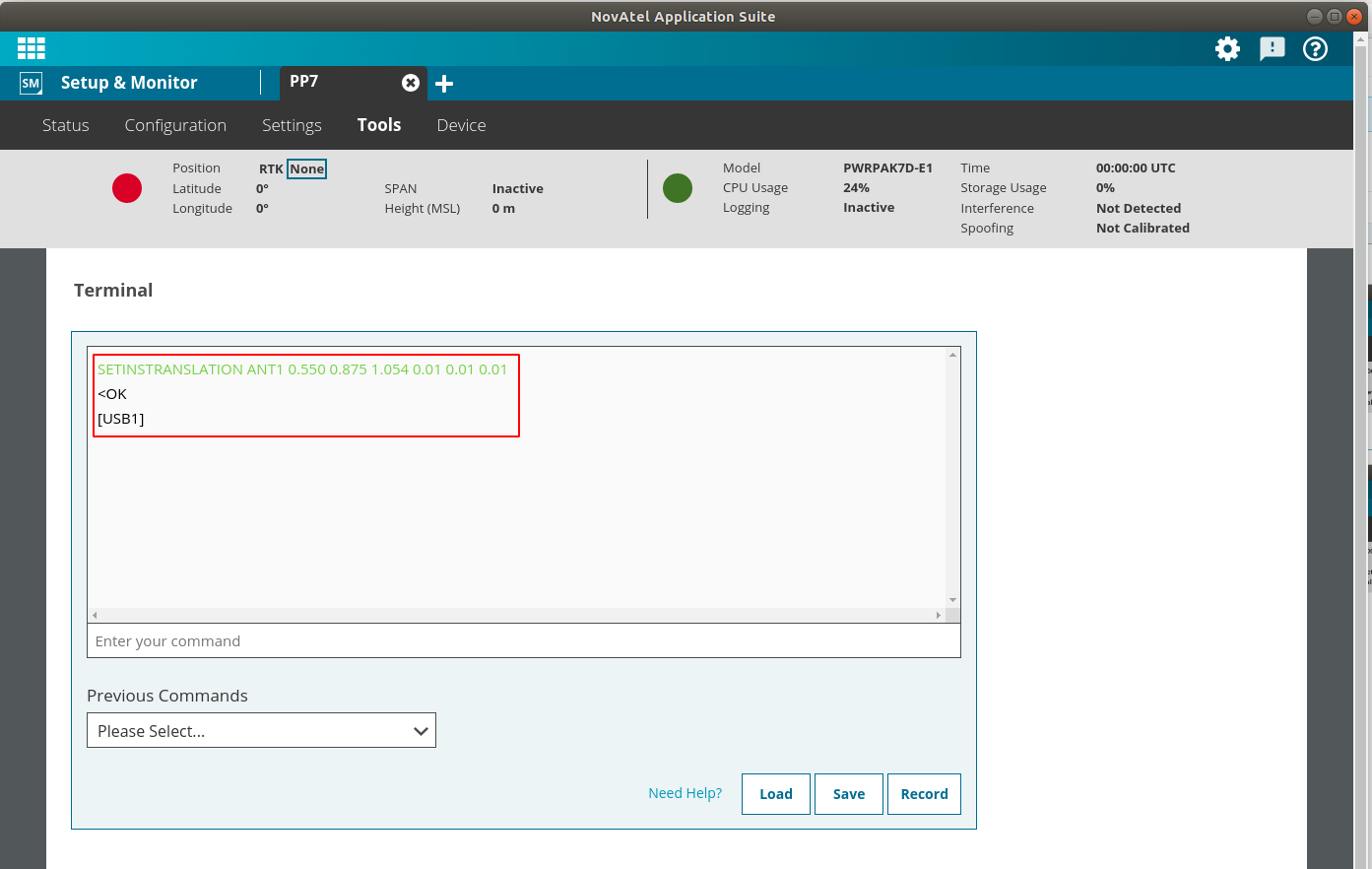
- 点击页面中的Tools,在下拉菜单中选择terminal选择项。打开命令终端页面。
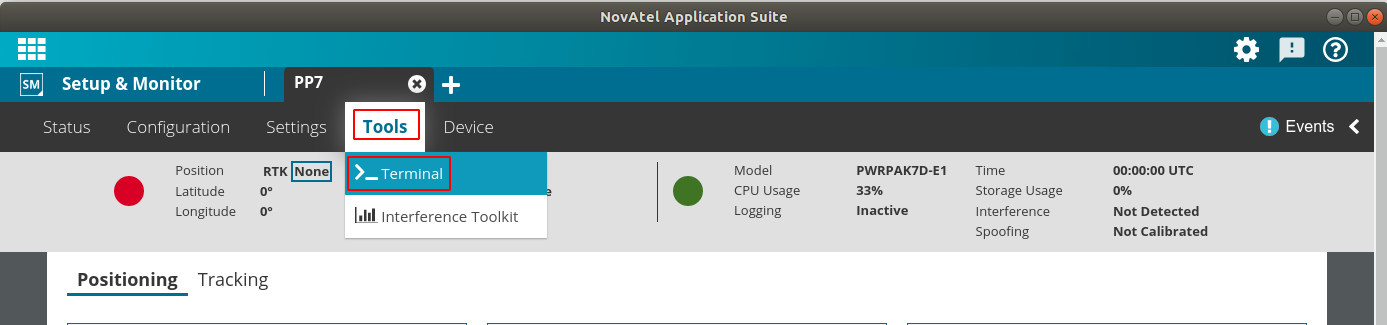
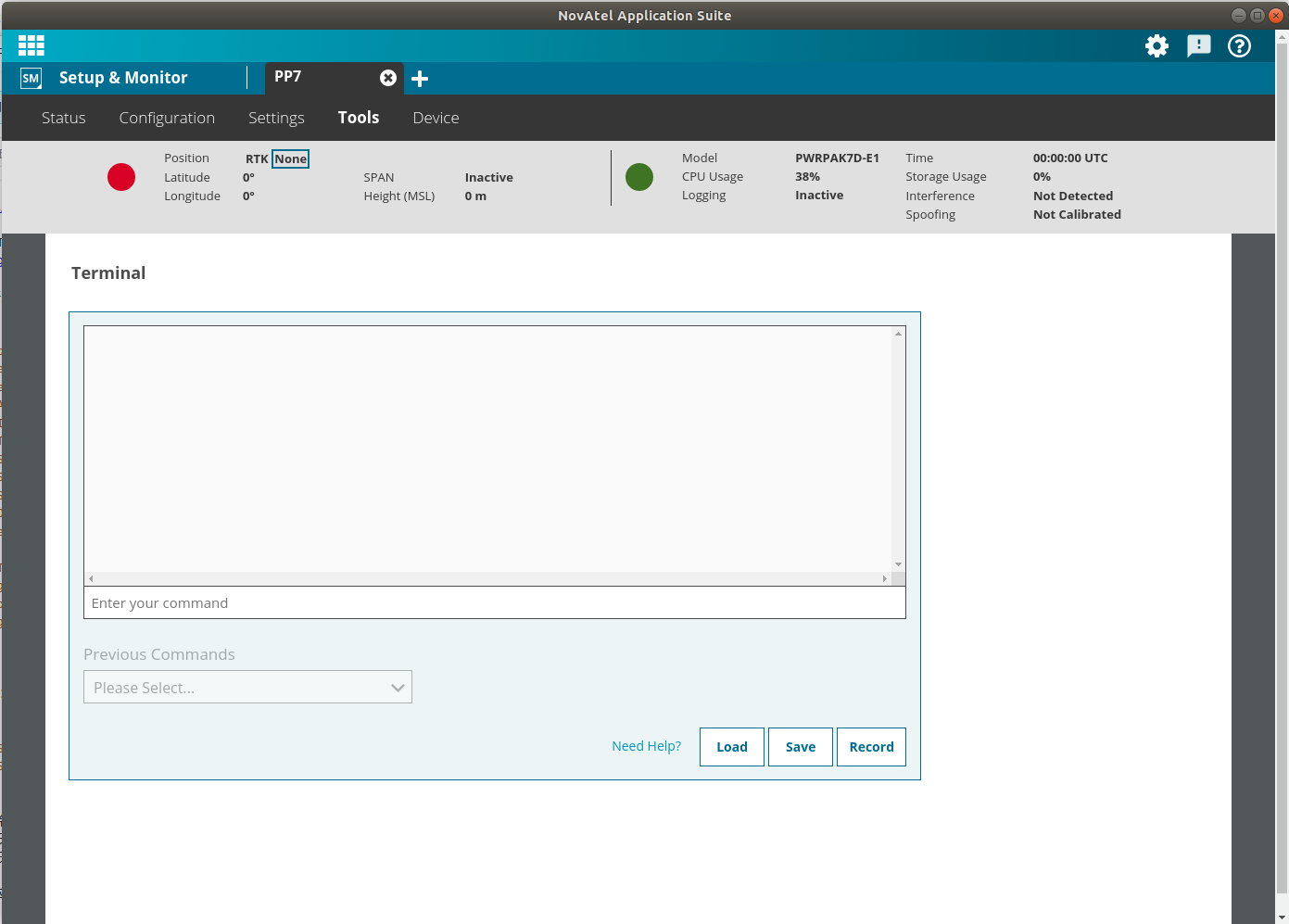
- 在命令终端中输入并执行命令:
freset进行恢复默认设置。命令执行后PP7会断开与NovAtel Application Suite的连接,请重新连接后再继续以下部分。命令行终端输入框为标有灰色Enter your command框,按回车键执行输入命令。 - 在命令行终端中输入并执行以下命令:
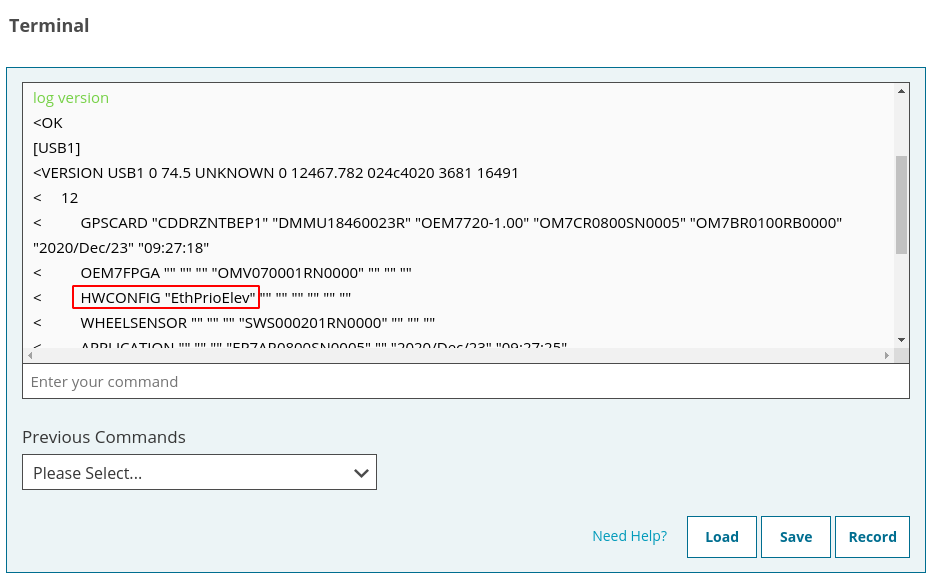
log version
a. 在terminal输出中查看HWCONFIG 配置的是否是 “EthPrioElev”,表示网口优先模式。若不是,请使用以下命令配置为此版本,命令为:CONFIGCODE ADD X3PD3C,7PKM76,D48WJD,GJ3HBM,9KFTM4,HWCT_70_0001
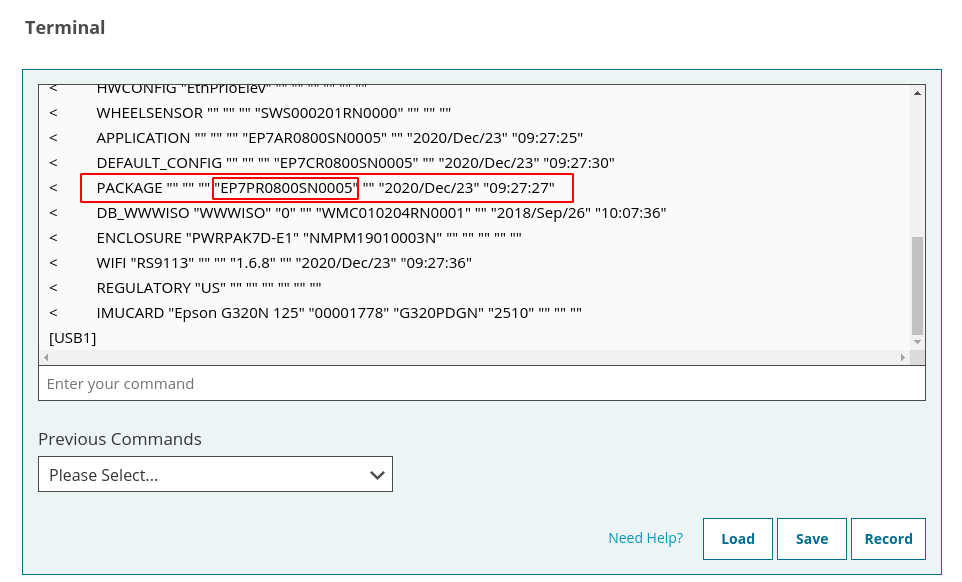
b. 查看PACKAGE使用的是否是“EP7PR0800SN0005”,这个是使用的PP7固件版本信息,若不是,请与供应商联系获取相应的版本升级至此版本。
- 在命令终端页面中依次执行以下命令,配置PP7设备:
SETALIGNMENTVEL 400.0
SETINSTRANSLATION ANT1 0.550 0.875 1.054 0.01 0.01 0.01
SETINSTRANSLATION ANT2 -0.550 0.875 1.054 0.01 0.01 0.01
SETINSROTATION RBV 0 0 0 1 1 1
SETINSPROFILE LAND_PLUS
ALIGNMENTMODE KINEMATIC
INSCOMMAND ENABLE
SERIALCONFIG COM1 9600 N 8 1 N OFF
SERIALCONFIG COM2 9600 N 8 1 N OFF
LOG COM2 GPRMC ONTIME 1 0.25
ETHCONFIG ETHA AUTO AUTO AUTO AUTO
ICOMCONFIG ICOM1 TCP :2000
ICOMCONFIG ICOM2 TCP :3000
IPCONFIG ETHA STATIC 192.168.10.4 255.255.255.0 192.168.10.1
IPSERVICE FTP_SERVER ENABLE
PPSCONTROL ENABLE POSITIVE 1.0 10000
EVENTINCONTROL MARK1 DISABLE
SETINSUPDATE ZUPT ENABLE
WIFIMODE OFF
dnsconfig 1 180.76.76.76
NTRIPCONFIG ncom1 disabled
rtksource auto any
psrdiffsource auto any
INTERFACEMODE ICOM2 RTCMV3 NOVATEL ON
SAVECONFIG注意:以上命令请请一条一条执行,且命令执行后,请确认命令行终端返回OK,表示命令配置成功。
- 所有命令配置完成后,请断掉PP7电源,以便保存配置更改。
命令简要说明:
SETINSTRANSLATION ANT1 0.550 0.875 1.054 0.01 0.01 0.01
SETINSTRANSLATION ANT2 -0.550 0.875 1.054 0.01 0.01 0.01上面的两条命令是配置PP7杆臂值的命令。其中:
- ANT1 后的3个数字是主天线的杆臂值;
- ANT2 后的3个数字是副天线的杆臂值;
- 杆臂值后面对应的3个指为3个坐标值的精度误差。
杆臂值就是对应的天线在 PP7 坐标系中的坐标,单位为米;PP7坐标系的xy轴平面已经印在了PP7上表面,z轴为垂直于xy坐标平面过原点向上。配置时,请根据实际情况进行更改。
PP7配置使用的是单根网线进行数据传输模式,在配置完PP7后,USB线缆可以从Linux主机上移除了。PP7配置的IP地址为192.168.10.4 。通过以上的配置命令进行配置的。这里顺便说一下HW3.0的网络配置。 HW3.0网络配置:
以太网1:manual模式,IP地址192.168.10.6,子网掩码255.255.255.0,网关192.168.10.1,DNS192.168.10.1以太网2:mamual模式,IP地址192.168.20.8,子网掩码255.255.255.0,网关空,DNS空
文档意见反馈
如果您在使用文档的过程中遇到问题,请到我们在【开发者社区】建立的 反馈意见收集问答页面 反馈,我们会根据反馈意见对文档进行迭代优化。