规划适配
该用户手册旨在帮助用户完成规划模块的配置和开环验证。规划模块需要上游的感知数据,目前有 Lidar 感知和 Camera 感知两种方案,您可以选择其中任意一种感知方案。
前提条件
步骤一:修改配置文件
对 /apollo/modules/planning/conf/planning.conf 和 /apollo/modules/planning/conf/planning_config.pb.txt 两个配置文件进行以下修改:
| 文件名称 | 参数 | 单位 | 说明 |
|---|---|---|---|
planning.conf |
修改 default_cruise_speed 数值。示例值:1.5 |
m/s | 默认巡航速度 |
planning.conf |
修改 planning_upper_speed_limit 数值。示例值:1.5 |
m/s | 车 planning 最大速度 |
planning.conf |
添加 planning_lower_speed_limit 数值。示例值:0.5 |
m/s | 车 planning 最小速度 |
planning.conf |
添加 speed_upper_bound 数值。示例值:1.5 |
m/s | 车最大速度 |
planning.conf |
添加 max_stop_distance_obstacle 数值。示例值:10 |
m | 障碍物最大停止距离 |
planning.conf |
添加 min_stop_distance_obstacle 数值。示例值:5 |
m | 障碍物最小停止距离 |
planning.conf |
添加 destination_check_distance 数值。示例值:1.0 |
m | 认为车已经到达目的地时,车与目的地距离 |
planning.conf |
添加 lon_collision_buffer 数值。示例值:0.3 |
m | 车与障碍物的默认碰撞距离 |
planning.conf |
添加 enable_scenario_park_and_go 配置项。示例值:false |
- | 使起步停车场景失效 |
planning_config.pb.txt |
修改 total_time 数值。示例值:15.0 |
s | planning 规划多长时间的路线 |
planning_config.pb.txt |
修改 max_acceleration 数值。示例值:1.0 |
m/s2 | 车辆最大加速度 |
planning_config.pb.txt |
修改 lowest_speed 数值。示例值:0.5 |
m/s | planning 时车的最低速度 |
planning_config.pb.txt |
修改 max_speed_forward 数值。示例值:1.5 |
m/s | 车前进的最大速度 |
planning_config.pb.txt |
修改 max_acceleration_forward 数值。示例值:1.0 |
m/s2 | 车前进的最大加速度 |
注意:重新启动 planning 模块,配置即可生效。为了安全起见,planning 速度一定要设置得比较小,建议您按照上面的给出的值来设置相应的配置参数。
步骤二:启动流程
把车辆开到户外,手动控制车辆,在感知有障碍物信息显示的情况下添加 routing 点并查看是否有 planning 轨迹线信息。
1. 拍下车辆尾部的急停开关
本文档目的是进行规划的适配,并完规划模块的开环验证,不需要车辆行驶,为了安全起见,将车开到室外调试场后,请全程确保急停开关处于按下状态。
2. 启动感知
启动感知模块,参见 感知适配。
3. 启动 Planning、Prediction、Routing、Control 模块
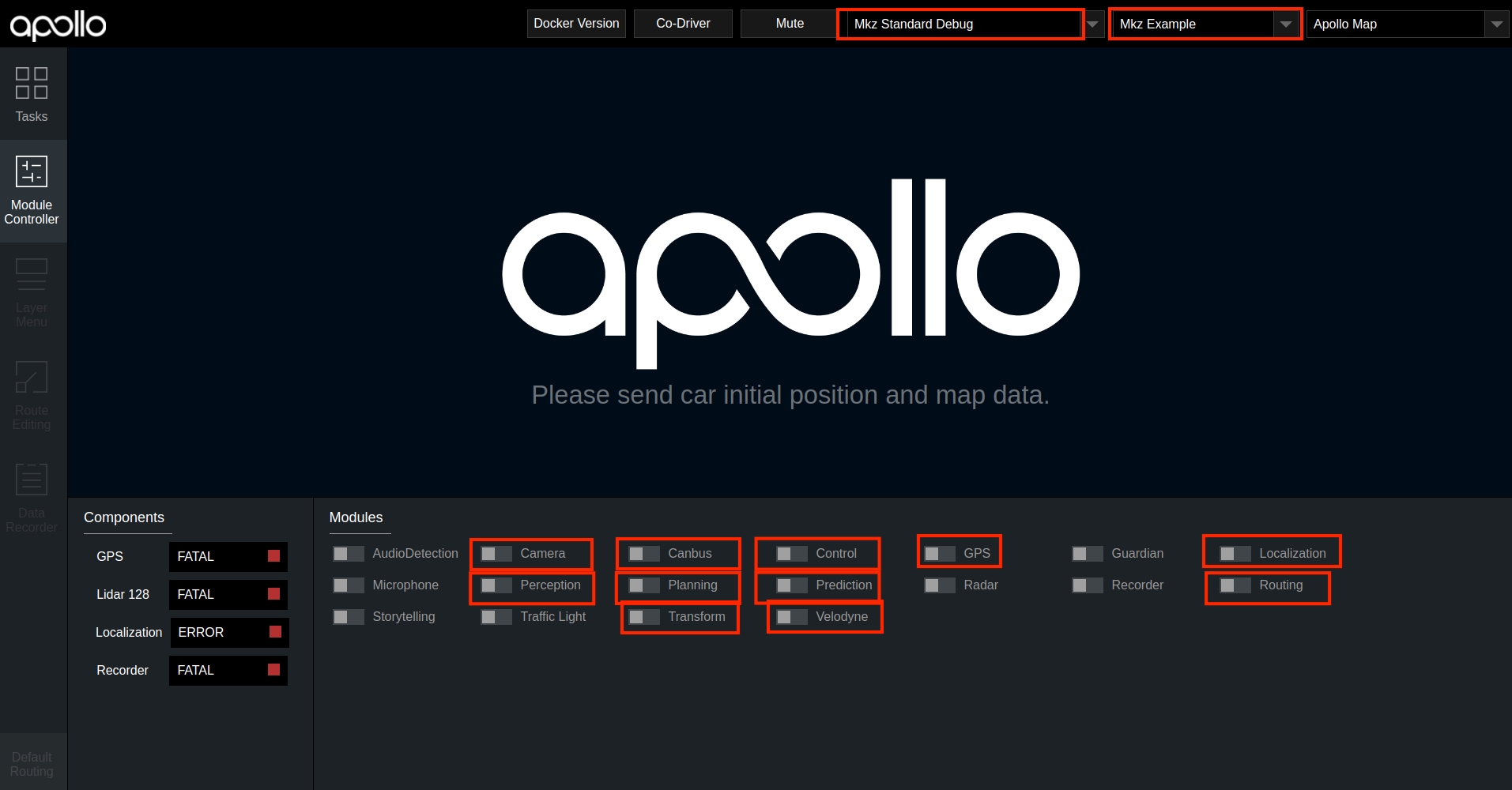
确保感知模块启动成功后,在 Module Controller 标签页启动 Planning、Prediction、Routing、Control 模块。DreamView 上显示启动的模块如下图所示:
4. 验证 Planning、Prediction、Routing、Control 模块是否启动成功
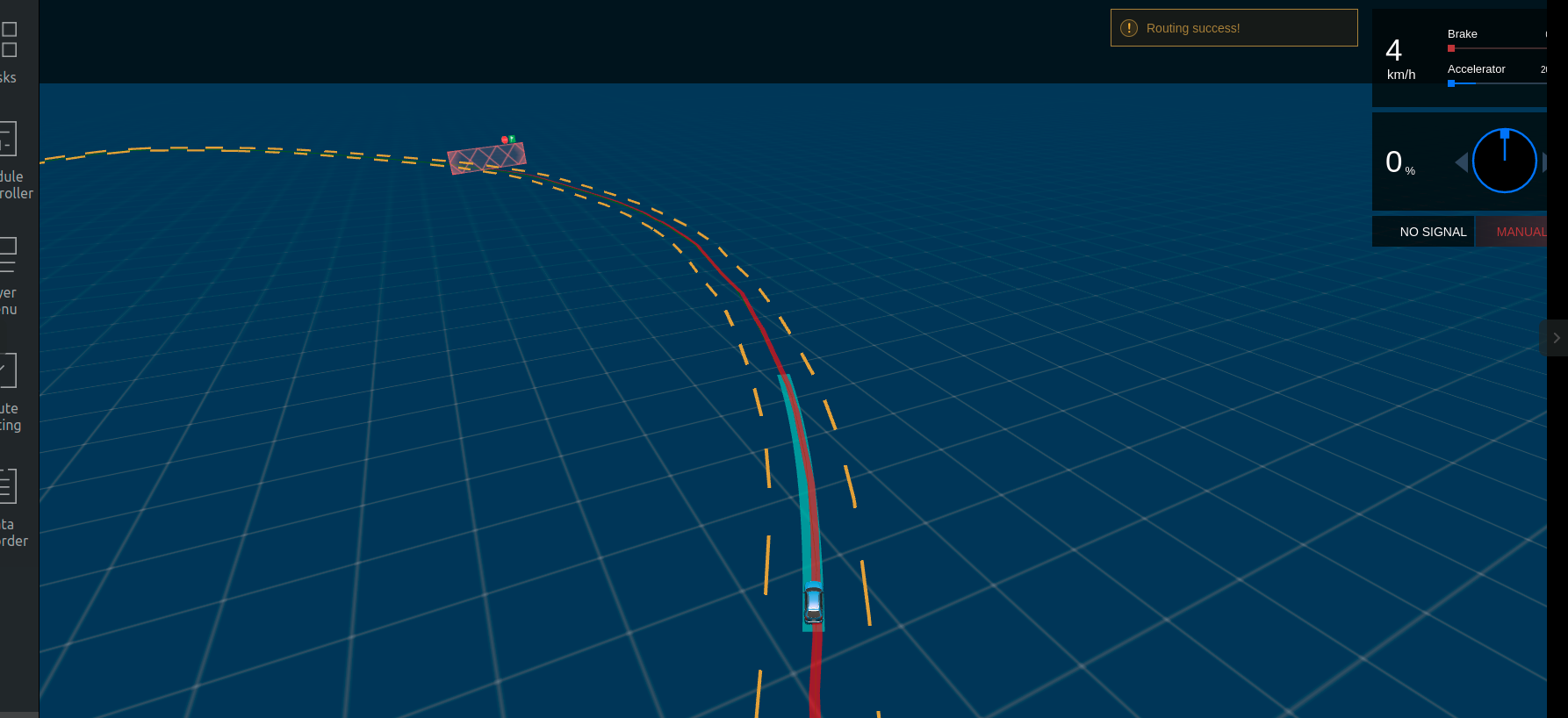
从 DreamView 中查看会出现一个蓝色的线以及一个红色的 stop 标志。如下图所示:
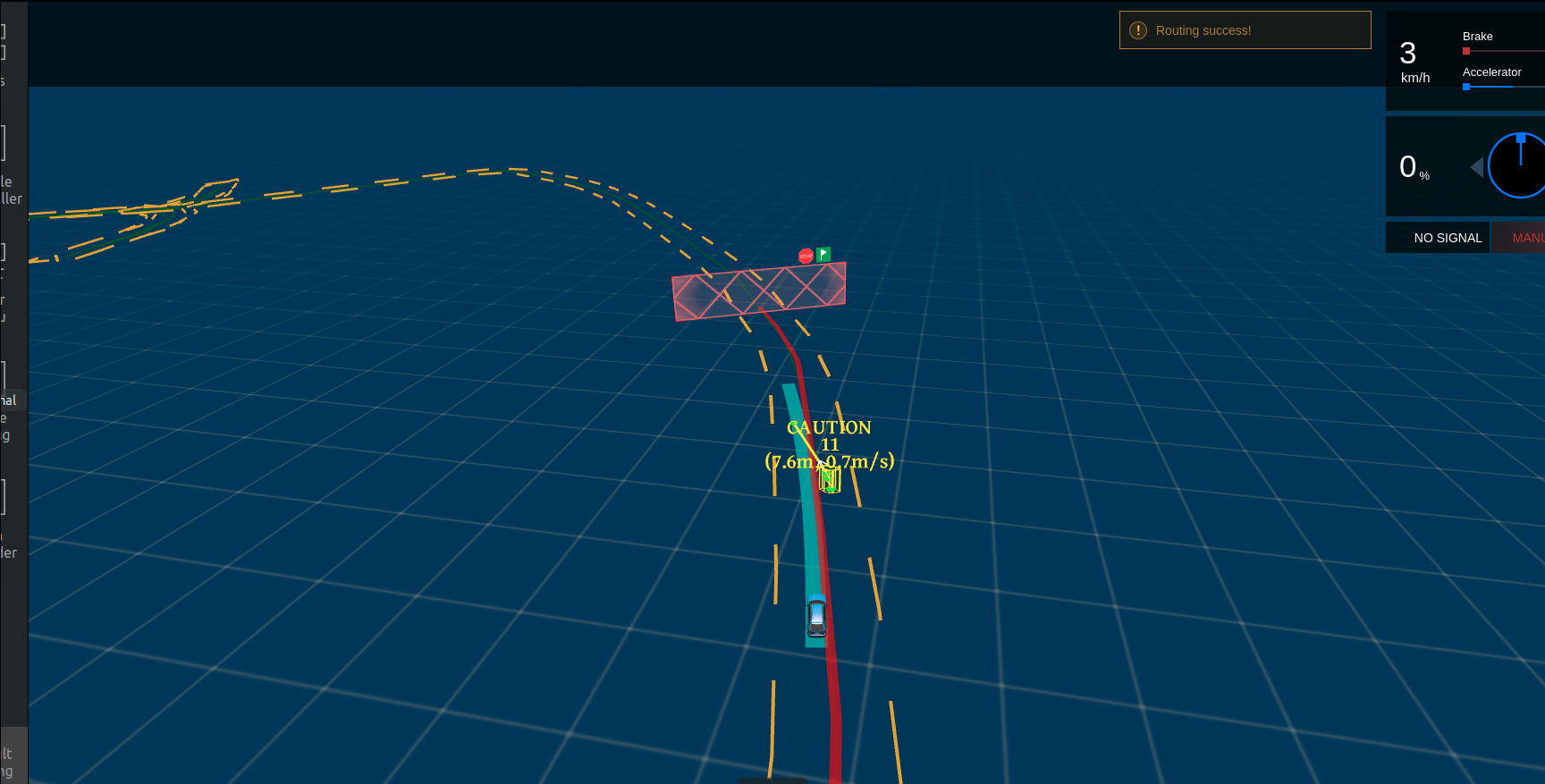
在车前方存在人或者自行车(车上有人)时,在 task 标签页查看 planning 轨迹线,正常情况下 planning 会重新规划轨迹,如下图所示:
在 docker 环境中输入命令 cyber_monitor 并查看 planning channel 信息:
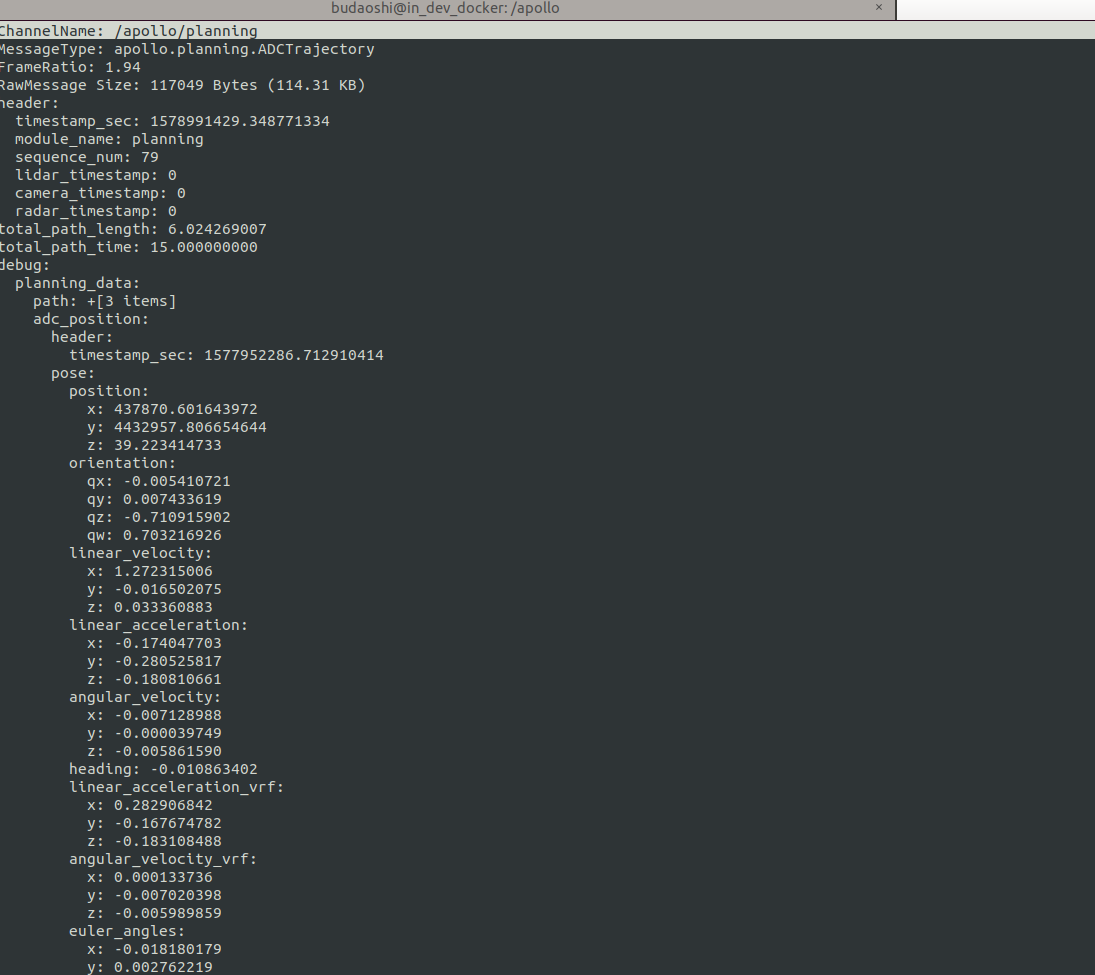
如果出现上图所示轨迹线和 topic 信息,表示规划模块适配和开环测试通过。否则,继续查看 log 信息进行调试。
NEXT
现在,您已经完成规划适配,根据您适配的是 Lidar 感知方案还是 Camera 感知方案,接下来可以开始 基于激光雷达的封闭园区自动驾驶搭建--自动驾驶演示 或 基于摄像头的封闭园区自动驾驶搭建--自动驾驶演示。
文档意见反馈
如果您在使用文档的过程中,遇到任何问题,请到我们在【开发者社区】建立的 反馈意见收集问答页面,反馈相关的问题。我们会根据反馈意见对文档进行迭代优化。