Channel数据格式文档介绍
【数据格式】文档,以【快速上手】中介绍的 demo_3.5.record 数据包为对象,介绍各个 Channel 和对应的内部消息格式(Message)。
前提条件
您需要提前了解:
Apollo 各模块通信框架
Apollo 系统各个模块之间的通信框架如下图所示:
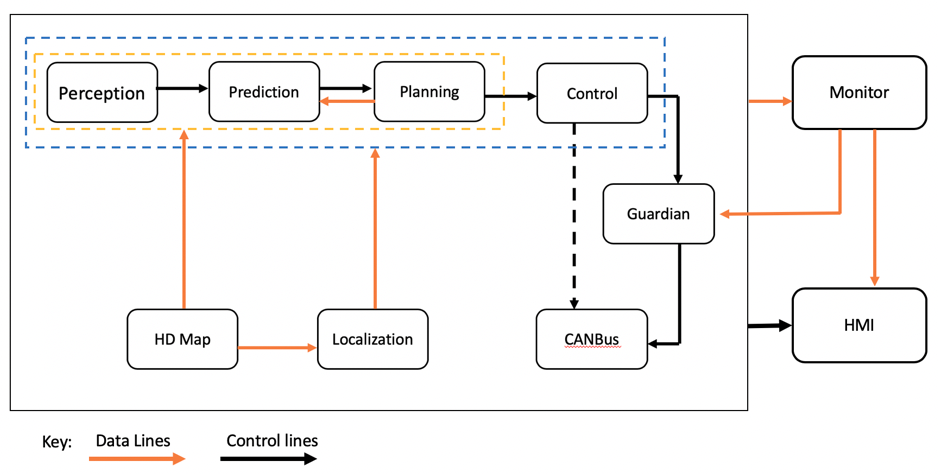
橘色的实线为数据流动线,黑色实线为控制逻辑线。各个模块的功能如下:
| 模块 | 功能 |
|---|---|
| 感知(Perception) | 识别交通参与者(汽车、自行车、行人等),识别交通信号灯等。 |
| 预测(Prediction) | 对交通参与者的行为进行预测。 |
| 规划(Planning) | 对主车行为进行决策,实时生成车辆规划线。 |
| 控制(Control) | 根据规划线目标,生成控制车辆指令(转角、速度、加速度)。 |
| 高精地图(HD Map) | 该模块类似于库。它不是发布和订阅消息,而是经常用作查询引擎支持,以提供关于道路的特定结构化信息。高精地图还可以提供环境静态感知能力。 |
| 定位(Localization) | 定位模块利用 GPS、LiDAR 和 IMU 的各种信息源来定位自动驾驶车辆的位置。 |
| 底盘通信 CANBus | CANBus 是将控制命令传递给车辆硬件的接口。将控制车辆指令发送至底盘,还将底盘信息传递给软件系统。 |
| 人机交互(HMI) | Apollo 中的 HMI 和 DreamView 是一个用于查看车辆状态,测试其他模块以及实时控制车辆功能的模块。 |
| 监控(Monitor) | 车辆中所有模块的监控系统包括硬件。 |
| Guardian | 安全模块,用于干预监控检测到的失败和 action center 相应的功能。 执行操作中心功能并进行干预的新安全模块应监控检测故障。 |
Apollo 通信系统
Apollo 的各个模块是以组件的形式存在的。组件之间利用数据通道进行通信。其中,最小的数据单元是消息格式来定义的。也有其他 Node、writer\reader 等,为了避免混淆,这里只关注组件、数据通道和消息格式。
| 通信单元 | 定义 |
|---|---|
| 组件(Component) | 在自动驾驶系统中,模块(如感知、定位、控制系统等)在 CyberRT 下以Component 的形式存在。不同 Component 之间通过 Channel 进行通信。Component 概念不仅解耦了模块,还为将模块拆分为多个子模块提供了灵活性。 |
| 数据通道(Channel) | 用于管理 Cyber RT 中的数据通信。用户可以发布/订阅同一个 Channel,实现 P2P 通信。 |
| 消息格式 (Message) | CyberRT 中用于模块之间数据传输的数据单元。 |
组件
Apollo 的系统是由各个模块的组件组成的,每一个组件类似于一个功能。一个模块(例如:定位、感知等)可以有多个组件。 各个组件之间通信是通过 Channel 实现。Channel 通信通道的具体数据格式则由 Message 定义。
数据通道
Channel 是传输数据的通道,管理 CyberRT 中的数据通信。用户可以发布/订阅同一个 Channel 建立通信,实现点对点(P2P)通信。
播放数据包之后,打开 CyberMonitor 工具并进入特定数据通道,可以看到每个 Channel 中都有 ChannelName、MessageType、FrameRatio、RawMessage Size 数据字段。关于播放数据包,参见 使用 Dreamview 查看数据包。
各个数据字段的名称和描述如下所示:
| 名称 | 描述 | 值 |
|---|---|---|
| ChannelName | 数据通道的名字。 | 例如:/apollo/perception/obstacles |
| MessageType | 通道内的数据的数据类型。 | 例如:apollo.perception.PerceptionObstacles |
| FrameRatio | 数据更新频率。 | 例如:10 HZ |
| RawMessage Size | 原始数据的数据大小。 | 例如:16863 字节 |
其中,MessageType 字段展现的数据格式是本 Channel 通道里使用的最小数据单元,由消息格式(Message)定义。示例中 apollo.perception.PerceptionObstacles 是数据通道 /apollo/perception/obstacles 的核心消息格式。
消息格式
Message 是 CyberRT 中用于模块之间数据传输的基本数据单元。Apollo 中,消息格式(Message)由 .proto 为后缀的文件定义。关于 .proto,参见 protobuf 官网。
以 perception_obstacle.proto 文件定义的 PerceptionObstacles 消息格式为例:
message PerceptionObstacles {
repeated PerceptionObstacle perception_obstacle = 1; // An array of obstacles
optional apollo.common.Header header = 2; // Header
optional apollo.common.ErrorCode error_code = 3 [default = OK];
optional LaneMarkers lane_marker = 4;
optional CIPVInfo cipv_info = 5; // Closest In Path Vehicle (CIPV)
}当一个消息格式(Message)由 .proto 文件定义好之后,其它模块均可以调用对应的消息格式。您可以根据自身需求,任意创建新的消息格式。参见 perception_obstacle.proto 文件。
注意:为了让您更直观的了解数据格式,本文档只介绍 demo_3.5.record 相关 Channel 中的数据格式。
消息格式主要分为两大类,即:
-
通用(Common)消息格式
各模块通用的消息格式,如定义时间的时间戳消息格式、错误代码消息格式。
-
特定模块消息格式
各模块独有的消息格式。
下文将介绍 demo_3.5.record 相关的通用消息格式和特定模块的消息格式。
通用消息格式
常用的通用的消息格式如下所示:
| 文件 | 定义的数据内容 | Message 定义 |
|---|---|---|
| header | 头信息 | 由 apollo.common.Header 定义 |
| error_code | 错误码 | 由 apollo.common.ErrorCode 定义 |
关于获取更多通用消息格式的信息,参见 Common 消息格式。
特定模块的消息格式
播放数据包并打开 CyberMonitor 后,可以看到以下数据通道和对应的主消息格式。 关于主消息格式的更多内容,参见对应的文档深入了解。
| 模块 | 数据通道 | 主消息格式 |
|---|---|---|
| CANBUS 模块 | /apollo/canbus/chassis | apollo.canbus.Chassis |
| 控制模块 | /apollo/control | apollo.control.ControlCommand |
| Guardian模块 | /apollo/guardian | apollo.guardian.GuardianCommand |
| 人机交互模块 | /apollo/hmi/status | apollo.dreamview.HMIStatus |
| 定位模块 | /apollo/localization/msf_gnss | apollo.localization.LocalizationEstimate |
| /apollo/localization/msf_lidar | apollo.localization.LocalizationEstimate | |
| /apollo/localization/msf_status | apollo.localization.LocalizationStatus | |
| /apollo/localization/pose | apollo.localization.LocalizationEstimate | |
| /apollo/sensor/gnss/corrected_imu | apollo.localization.CorrectedImu | |
| /apollo/sensor/gnss/odometry | apollo.localization.Gps | |
| 监控模块 | /apollo/monitor | apollo.common.monitor.MonitorMessage |
| /apollo/monitor/system_status | apollo.monitor.SystemStatus | |
| 感知模块 | /apollo/perception/obstacles | apollo.perception.PerceptionObstacles |
| /apollo/perception/traffic_light | apollo.perception.TrafficLightDetection | |
| 规划模块 | /apollo/planning | apollo.planning.ADCTrajectory |
| 预测模块 | /apollo/prediction | apollo.prediction.PredictionObstacles |
文档意见反馈
如果您在使用文档时遇到问题,请到我们在【开发者社区】建立的 反馈意见收集问答页面,反馈相关的问题。我们会根据反馈意见对文档进行迭代优化。